Skeneri
Industrijski Skeneri
NDT industrijski skeneri mogu se koristiti u širokom rasponu industrijskih aplikacija za poboljšanje brzine ispitivanja, kvalitete podataka i vjerojatnosti otkrivanja neusklađenosti u metrijalu. Nudimo industrijske skenere s jednom ili dvije osi (XY) u motoriziranoj i poluautomatiziranoj (ručnoj) verziji. Naši skeneri za pregled zavara mogu nositi više sondi, omogućujući pregled s više ispitnih metoda odjednom. Naši skeneri za ispitivanje korozije koriste se na cijevima ili ravnim površinama u kombinaciji sa HydroFORM™ skenerom, s fleksibilnim phased array sondama ili Dual Linear Array™ sondama, dok su naši zrakoplovni skeneri napravljeni da dobro prijanjaju na kompozitne površine. Kako biste upotpunili svoje rješenje za inspekciju, Olympus nudi mnoge modele phased array sondi i klinova, kao i dodatnu opremu, kao što su pretpojačala pulsera i prijemnika, adapteri i pumpe za vodu kao kontaktno sredstvo.
Skeneri za ispitivanje zavarenih spojeva
Skeneri za ispitivanje korozije
Skeneri za aeroindustriju i vjetroelektrane
Skeneri za ispitivanje zavarenih spojeva
Olympus ima široku paletu skenera za potrebe inspekcije zavara u proizvodnji ili održavanju. Imamo rješenja od promjera malih cijevi do ravnih ploča s kapacitetom montiranih više sondi za potpuno pokrivanje volumena zavara. Bilo da odaberete motoriziranu ili ručnu opciju, naši skeneri nude svestranost, pouzdanost i ponovljivost.

AxSEAM
Poluautomatizirani skener AxSEAM™ olakšava pregled dugih zavara u cijevima. Skener prati brzinu skeniranja i gubitak kontakta zbog nedostatka kontaktnog sredstva i prikupljanje podataka u jedinici OmniScan™ na modulu ScanDeck™. Lako podesivi držači sondi podržavaju 4 sonde, omogućujući PA, TOFD i TFM inspekciju.

SteerROVER
SteerROVER je potpuno automatiziran, upravljiv motorizirani skener koji može obavljati inspekciju zavara na udaljenim lokacijama. Može montirati phased array kao i TOFD sonde za pregled obodnih ili uzdužnih zavara.

WeldROVER™ Skener
WeldROVER skener dizajniran je za brze i učinkovite preglede phased array metodom ispitivanja na feromagnetskim zavarenim spojevima cijevi ili posuda i dugim zavarima uz minimalno vrijeme obuke i postavljanja.

HST-Lite Skener
Novi HST-Lite skener savršen je izbor za isplative, jednokanalne TOFD in- spekcije kada je kvaliteta signala važna. Kombinacija magnetskih kotača i držača sonde s oprugom nudi stabilnost potrebnu za obavljanje visokokvalitetnih jenolinijskih inspekcija. Skenerom se može upravljati samo jednom rukom, a pričvrstit će se za feromagnetske površine čak i kada je u položaju naopako.

Mini-Wheel Encoder
Mini-Wheel Encoder koristi se za pozicioniranje i dimenzioniranje neusklađenosti u osi skeniranja. Može sinkronizirati prikupljanje podataka s kretanjem sonde. Također je vodootporan i kompatibilan s Olympusovim standardnim PA klinovima.

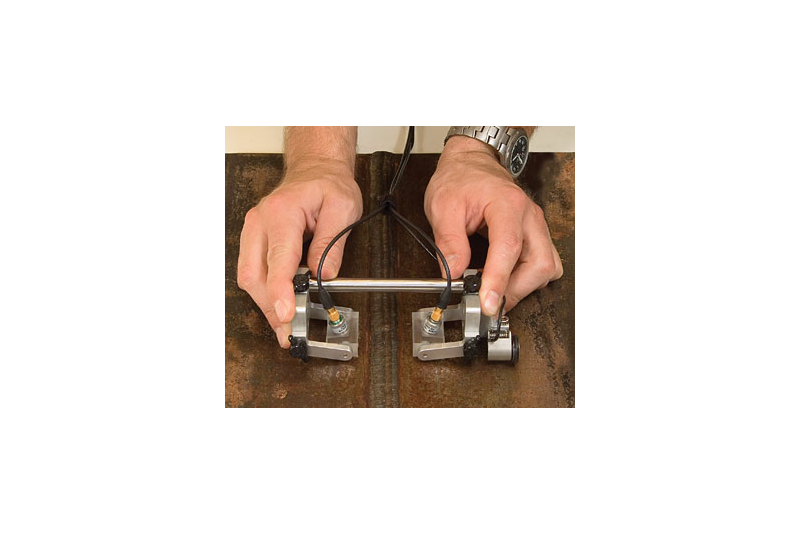
COBRA Scanner
Ručni skener COBRA u kombinaciji s defektoskopom OmniScan X3 koristi se za izvođenje obodnog pregleda zavara na cijevima malog promjera. COBRA može nositi dvije PA sonde za pregled cijevi s vanjskim promjerom u rasponu od 0,84 do 4,5 inča.

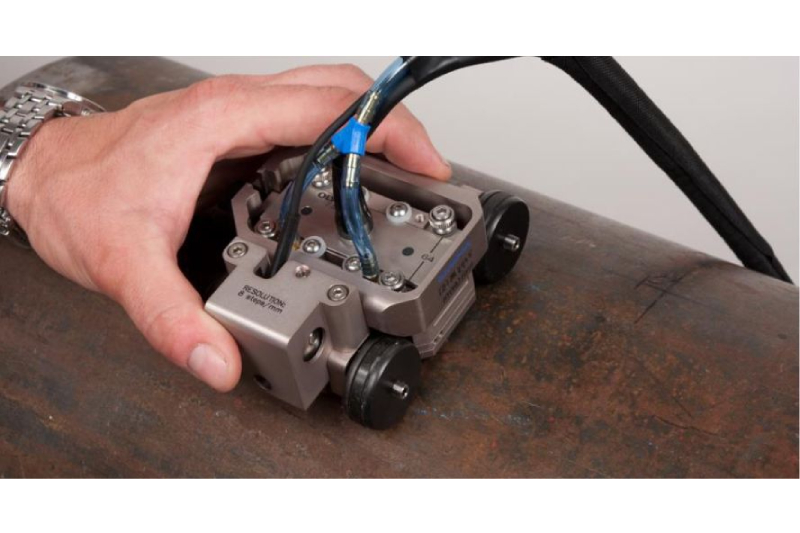
HSMT-Compact Scanner
HSMT-Compact je ručni jednoosni kodirani skener. Konkretno, lagan je i malen, a također i svestran. Može se koristiti (s do 4 sonde) na pločama i za obodno skeniranje cijevi promjera od samo 4,5 in pa naviše.

HSMT-Flex Scanner
HSMT-Flex je namijenjen za ručno kodirano jednoosno ispitivanje obodnih zavara na cijevima promjera od 4,5 in. naviše. Skener se može opremiti s do 8 sondi pomoću opcijskih držača sondi, zahvaljujući mogućnosti savijanja u sredini.
HST-X04
Olympus HST-X04 ručni difrakcijski skener (TOFD) nudi učinkovito, jeftino i svestrano rješenje za pregled zavara.

VersaMOUSE Scanner
VersaMOUSE™ je skener dizajniran za linearno kodirano skeniranje sa PA sondom. Integrirani gumb za indeksiranje čini ga idealnim za aplikacije 2-D mapiranja kao što su CFRP ravne ploče i inspekcije korozije. VersaMOUSE može izvesti kodirano skeniranje jednog prolaza, nakon čega slijedi skeniranje položaja u okomitom smjeru. Zatim se može izvesti još jedno skeniranje u jednom prolazu i usporediti s prethodnim skeniranjem. Ovaj se postupak ponavlja kako bi se proizvela potpuna 2D karta područja interesa.
Skeneri za ispitivanje korozije
Ispitivanje korozije vrlo je zahtjevna aplikacija koja zahtijeva mogućnost preciznog kodiranja položaja sonde u najviše dvije osi. Skeneri se mogu montirati na cijevi i ravne površine i jednostavni su za korištenje za brzo otkrivanje nedostataka od laminacije izazvane proizvodnjom do smanjenja debljine stijenke tijekom rada.

FlexoFORM
Inovativni FlexoFORM skener olakšava zahtjevnu inspekciju korozije koljena cijevi. Fleksibilna phased array tehnologija skenera omogućuje korištenje jedne sonde za pokrivanje cijelog raspona promjera koljena cijevi.
SteerROVER
SteerROVER je potpuno automatiziran, upravljiv motorizirani skener koji može obavljati inspekciju zavara na udaljenim lokacijama. Može montirati phased array kao i TOFD sonde za pregled obodnih ili uzdužnih zavara.

MapSCANNER
MapSCANNER je poluautomatizirani dvoosni skener za ispitivanje korozije. U kombinaciji s HydroFORM ili Dual Linear Array (DLA) PA rješenjima za ma-piranje korozije, čini snažan, učinkovit alat za C-Scan snimanje preostale debljine stijenke i neusklađenosti unutar materijala.

MapROVER
MapROVER je potpuno automatizirani, motorizirani dvoosni skener za mapiranje korozije. U kombinaciji s HydroFORM ili DLA PA sondama za ma-piranje korozije, nastaje moćan alat za C-Scan snimanje preostale debljine stijenke i neusklađenosti unutar materijala.
HydroFORM/RexoFORM Scanners
Uvođenjem poluautomatiziranog PA rješenja na tržište ispitivanja korozije, Olympus nije samo uveo novu tehnologiju, već i novi svijet mogućnosti. Re-cite zbogom nesigurnom i nepouzdanom motoriziranom rasteriranju malih UT sondi; PA sonde pokrivaju veću površinu i mogu se ručno kretati sigurnom brzinom. Ovo rješenje omogućuje inspitivačima veću produktivnost i preciznije rezultate

ChainSCANNER
ChainSCANNER nudi rješenje za ručnu inspekciju cijevi promjera od 1,75 do 38 in. Skener, koji se drži za cijev karikama lanca umjesto magnetskim kotačima, vrlo je prikladan za ispitivanje zavara ili korozije na različitim materijalima. UT, TOFD, PA.

GLIDER Scanner
GLIDER skener je skener za kodiranje s 2 osi (X-Y) za ručnu inspekciju blago zakrivljenih ili ravnih kompozitnih površina. Skener, koji se drži vakuumskim čašicama, vrlo je prikladan za rastersko skeniranje. Tehnologije: ECA, EC, UT, PA.
VersaMOUSE Scanner
VersaMOUSE™ je skener dizajniran za linearno kodirano skeniranje sa PA sondom. Integrirani gumb za indeksiranje čini ga idealnim za aplikacije 2-D mapiranja kao što su CFRP ravne ploče i inspekcije korozije. VersaMOUSE može izvesti kodirano skeniranje jednog prolaza, nakon čega slijedi skeniranje položaja u okomitom smjeru. Zatim se može izvesti još jedno skeniranje u jednom prolazu i usporediti s prethodnim skeniranjem. Ovaj se postupak ponavlja kako bi se proizvela potpuna 2D karta područja interesa.
Mini-Wheel Encoder
Mini-Wheel Encoder koristi se za pozicioniranje i dimenzioniranje neusklađenosti u osi skeniranja. Može sinkronizirati prikupljanje podataka s kretanjem sonde. Također je vodootporan i kompatibilan s Olympusovim standardnim PA klinovima.
Skeneri za aeroindustriju i vjetroelektrane
Inspekcija velikih površina uz brzu akviziciju C-skenom ključna je značajka za zrakoplovnu industriju. Skeneri s vakuumskim čašicama dobro su prilagođeni držanju na kompozitnim površinama, tako da možete izvršiti inspekciju s do dvije precizno kodirane osi.

RollerFORM
Sonde s kotačima RollerFORM™ i RollerFORM XL pružaju visokokvalitetno ultrazvučno ispitivanje s PA sondama kompozitnih materijala, poput onih koji se koriste u komponentama zrakoplovstva i lopaticama vjetroturbina. Pristupačna zamjena za sustave potpunog 2D kodiranja, Roller – FORM skeneri nude održivu alternativu imerzionim tehnikama.
Mini-Wheel Encoder
Mini-Wheel Encoder koristi se za pozicioniranje i dimenzioniranje neusklađenosti u osi skeniranja. Može sinkronizirati prikupljanje podataka s kretanjem sonde. Također je vodootporan i kompatibilan s Olympusovim standardnim PA klinovima.
GLIDER Scanner
GLIDER skener je skener za kodiranje s 2 osi (X-Y) za ručnu inspekciju blago zakrivljenih ili ravnih kompozitnih površina. Skener, koji se drži vakuumskim čašicama, vrlo je prikladan za rastersko skeniranje. Tehnologije: ECA, EC, UT, PA.
VersaMOUSE Scanner
VersaMOUSE™ je skener dizajniran za linearno kodirano skeniranje sa PA sondom. Integrirani gumb za indeksiranje čini ga idealnim za aplikacije 2-D mapiranja kao što su CFRP ravne ploče i inspekcije korozije. VersaMOUSE može izvesti kodirano skeniranje jednog prolaza, nakon čega slijedi skeniranje položaja u okomitom smjeru. Zatim se može izvesti još jedno skeniranje u jednom prolazu i usporediti s prethodnim skeniranjem. Ovaj se postupak ponavlja kako bi se proizvela potpuna 2D karta područja interesa.